

{kind=link}
Pesquisadores da Universidade de Cambridge desenvolveram o primeiro head-up display de realidade aumentada baseado na tecnologia LiDAR para uso em veículos.
A tecnologia, desenvolvida por pesquisadores da Cambridge University, Oxford University e University College London (UCL), é baseada no LiDAR - tecnologia de obtenção e processamento de informações sobre objetos distantes usando sistemas ópticos ativos que utilizam os fenômenos de absorção e espalhamento de luz em sistemas ópticos mídia transparente.
Sobre o assunto: Como as pessoas imaginavam o futuro cem anos atrás
Com base nos dados LiDAR, são criadas imagens holográficas de ultra-alta definição de objetos rodoviários que o motorista vê.
De acordo com dados coletados nas ruas do centro de Londres, imagens holográficas aparecem no campo de visão do motorista de acordo com sua localização real, criando assim uma realidade aumentada. Isso pode ser especialmente útil quando objetos como placas de trânsito estão escondidos atrás de árvores ou caminhões. O novo desenvolvimento permite que você veja literalmente através dos obstáculos.
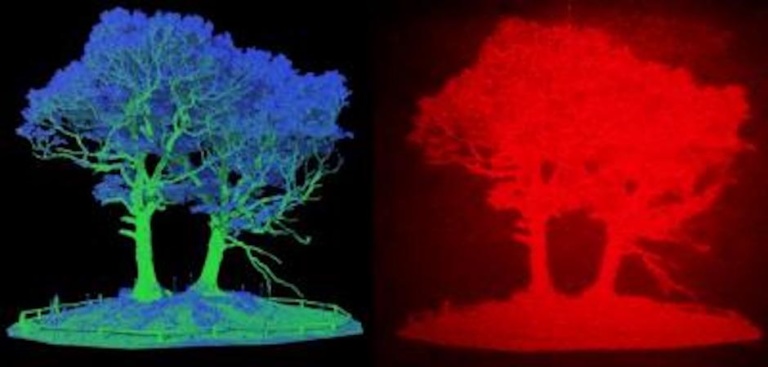
Usando o LiDAR, os pesquisadores escanearam a Male Street, uma importante rua no centro de Londres. Milhões de pulsos foram enviados de várias posições ao longo da Male Street. Os dados LiDAR foram então combinados com os dados da nuvem de pontos, resultando em um modelo 3D.

Especialistas explicam que, embora os dados sejam coletados de uma plataforma estacionária, serão semelhantes aos sensores usados em veículos autônomos de próxima geração. Para isso, os pesquisadores estão trabalhando na miniaturização dos componentes ópticos para que possam caber dentro de um carro e, em seguida, testando os veículos nas vias públicas de Cambridge.
No futuro, a equipe espera personalizar a localização das telas de projeção e criar um algoritmo capaz de projetar várias camadas de objetos diferentes que possam ser posicionados livremente no campo de visão do motorista. Por exemplo, no primeiro nível, um sinal de estrada a uma distância maior pode ser projetado em tamanho menor e, no segundo nível, um sinal de aviso a uma distância mais próxima pode ser exibido em tamanho maior.
Leia também:
- LiDAR no iPhone 12 Pro: o que é e por quê?
- Huawei investe mais de US$ 1 bilhão em tecnologias para veículos elétricos